|
| 1. Introduction |
Il s´agit aujourd´hui de
commander les moteurs de nos chères locomotives,
ou ceux des accessoires du réseau, par l´intermédiaire de nos
montages logiques, ou même plus généralement, par
un système tout ou rien :
simple bouton poussoir, contacts de relais, petits schémas CMOS,
Télécommande
universelle du troisième
type ou microP... Contrairement aux aiguilles,
il ne s´agit plus de “tout ou rien” avec beaucoup de punch mais
de doser
délicatement
la tension et la puissance.
|
|
|
 |
|
Nous
passerons sous silence les solutions moyenâgeuses dont nous avons
usé au siècle dernier, dont la moins ridicule consistait à commander en
tout ou rien, ce qui est très simple, un
moteur qui lui-même
entraînait, dans les deux sens, le potentiomètre d´une
alim du commerce  ! !
 Cela dit,
avec le recul du temps, je ne sais toujours pas comment j´aurais pu
bénéficier autrement des qualités
extraordinaires de mes platines Gaugemaster Cela dit,
avec le recul du temps, je ne sais toujours pas comment j´aurais pu
bénéficier autrement des qualités
extraordinaires de mes platines Gaugemaster  (cf. le
site de F.B.S.). (cf. le
site de F.B.S.). |
Et nous ne dirons aujourd´hui
que deux mots sur les montages autres que ceux utilisant la conversion numérique-analogique
(C.N.A.).
|
| 2. Condensateur et émetteur
suiveur |
|
|
|
Charger
ou décharger à travers une résistance
un condensateur qui mémorisera une tension au point [t]  ;
cette tension sera recopiée par un transistor de puissance
pour alimenter la voie. ;
cette tension sera recopiée par un transistor de puissance
pour alimenter la voie.
C´est par
exemple utilisé par l´alim
presse-bouton de la T.T.T. dans sa version originale.
Attention,
on ne prévoit pas, dans ce petit schéma, de protection
contre les courts-circuits (placez une lampe ballast en série cf. le
site A.M.F.N., ou alimentez en amont votre montage via un
LM350 sur un gros radiateur...). |
|
 |
|
3. La modulation par largeur
d´impulsions
(M.L.I. ou P.W.M.) |
|
|
|
 |
|
Le
plus gros pourcentage des moteurs du monde entier est mû par ce procédé :
avec Google et le mot “PWM” vous accéderez à des
millions de pages ! On applique la tension maximale
au moteur mais pas tout le temps... ( Schéma
d´après
la page
de l´A.M.F.N., une référence
en matière d´alimentation du réseau !)
Au
démarrage, quelques petites impulsions, un dixième du temps... Puis
un peu plus, 2/5 du temps... Puis à 3/4, la loco roule à 75 %
de sa vitesse, etc.
Les impulsions sont
rapides (250 fois par seconde par exemple) de telle sorte que le moteur
semble tourner continument. Ces “coups de pied au derrière”
que subit le moteur sans cesse, même au démarrage, assurent
des ralentis sensationnels. Au chapitre inconvénients :
une réputation
(vraie ou supposée) de fatiguer les moteurs à rotors
sans fer (R.S.F.) qui a fait couler plus d´encre que les théories
d´Einstein...
En pratique, allez
jeter un oeil sur un minuscule montage
M.L.I. à 555 et aussi, bien sûr, sur
Pictrain2, notre montage à microprocesseurs
qui exploite ce procédé tout en l´expliquant . |
|
| 4. La conversion numérique-analogique |
Arrivons-en à notre
but pour aujourd´hui : la C.N.A. Elle sera traitée à la Ptitrain,
c´est-à-dire non point avec des circuits spécialisés introuvables
mais avec les quatre à cinq euros tout compris d´un montage discret.
De ce montage discret,
nous retiendrons la sortie, la C.N.A. proprement dite, que nous récupérerons
pour nos T.T.T. et microP.
Quoique
fabriqué et testé depuis cinq ans, ce montage baptisé Numérax,
n´a pas paru dans notre magazine : il était trop “fouillé” pour
nos débutants
de 1999, qui se contentèrent
de l´alim presse-boutons et, il y a quelques mois, il a été dépassé par
Pictrain2. Néanmoins, une sortie en pur courant continu doit être
proposée,
ne serait-ce que pour les lecteurs qui n´oseront jamais confier leurs locos
très chères
à moteurs R.S.F. à des alims non continues.
Principe :  on
appuie sur un bouton poussoir (Ax) pour accélérer, sur un
autre (Fr) pour freiner. Il y a des “crans” de vitesse comme
sur une vraie loco, seize crans, du démarrage
(à zéro volt) à la vitesse maximale (12 volts ou plus, à votre
goût). Si on laisse son doigt enfoncé sur le bouton
poussoir, la commande se répète automatiquement au bout d´un
instant. on
appuie sur un bouton poussoir (Ax) pour accélérer, sur un
autre (Fr) pour freiner. Il y a des “crans” de vitesse comme
sur une vraie loco, seize crans, du démarrage
(à zéro volt) à la vitesse maximale (12 volts ou plus, à votre
goût). Si on laisse son doigt enfoncé sur le bouton
poussoir, la commande se répète automatiquement au bout d´un
instant.
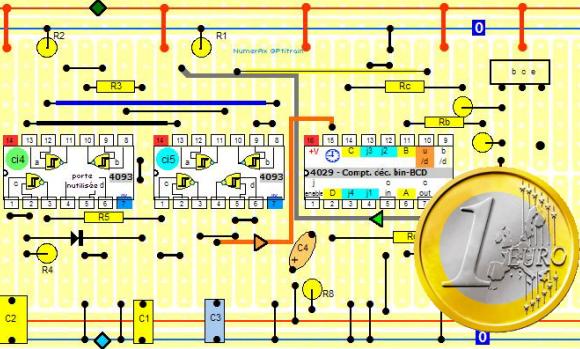
Le nombre de ces impulsions
faites au bouton poussoir est transmis (via trois fils, ici des triangles
de couleurs) au schéma ci-dessous où il est compté par...
un compteur (circuit
4029, déjà connu),
et ce compte est matérialisé par
un chiffre binaire (de 0000 à 1111)
apparaissant sur les sorties A, B, C et D .
Ce chiffre monte ou descend, grandit ou diminue, selon qu´on
appuie sur Ax (“comptage”,
en montant) ou Fr (“décomptage”, en descendant).
(Si vous ignorez encore
ce qu´est un nombre binaire, veuillez vous reporter à notre
page ad hoc.)
Toute la conversion
numérique-analogique (un bien grand mot !) a lieu au
niveau des quatre résistances
Ra, b, c et d, qui additionnent, dans une certaine mesure, les bits A,
B, C et D et le traduisent en une tension. Celle-ci est amplifiée
en courant (puissance) par un gros transistor et hop, la loco bouge...
Ça n´est pas
tant la valeur des résistances que leur rapport entre elles qui
fait l´opération :
les R ont des valeurs croissantes étagées en se doublant
à chaque bit, 4, 8, 16 et 32 kΩ (valeurs qui n´existent pas
dans la nature et doivent être
approchées par des mises en série de valeurs standards :
2,2 kΩ suivi de 1,8 kΩ feront 4 kΩ...).
|
|
|
C´est
seulement cette partie à quatre résistances qui sera
utilisée par
nos microP ; notez que vous pouvez facilement ajouter
un ou deux bits afin de bénéficier de crans
de marche en plus grand nombre (64, 128...) et donc une souplesse
plus grande. Et bien sûr, le
chiffre binaire sera le fruit du programme que vous aurez écrit
dans le microP.
 Voici à titre informatif, un plan de ce montage Numérax sur un Cimec, la
pièce de un euro donne l´échelle. Voici à titre informatif, un plan de ce montage Numérax sur un Cimec, la
pièce de un euro donne l´échelle. |
|
 |
|