|
| 9.1.
L´électronique |
|
|
| 9.1.1. Schéma
général |
Le schéma électronique
est des plus simple :
 une partie “commande” une partie “commande”  ,
qui comprend le microP et les commandes, ,
qui comprend le microP et les commandes,
une partie “puissance”,
qui comprend la régulation du courant traction.
Les deux parties sont
reliées par un câble à 3 conducteurs. Cela permet d´avoir
une commande “baladeuse” que l´on peut tenir à la
main.
| |
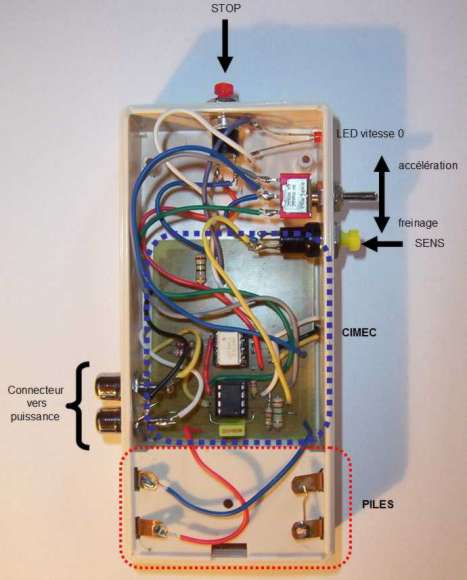
| 9.1.2. Partie commande |
Le microP est alimenté sous
3 volts par deux piles AA. Le boîtier regroupe
toutes les commandes :
un
inverseur “momentané”, qui permet d´envoyer
les impulsions d´accélération ou de freinage,
un
bouton stop (arrêt d´urgence),
une led qui indique que la vitesse
est à zéro et que le
changement de sens est possible,
un
bouton inverseur de sens.
En
sortie on trouve le signal rectangulaire du courant et la commande
du relais d´inversion du sens de marche. Ces deux signaux sont
connectés à la partie “puissance” par un
optocoupleur (on voit les deux moitiés des optocoupleurs dans
le schéma ci-dessous) et le câble.
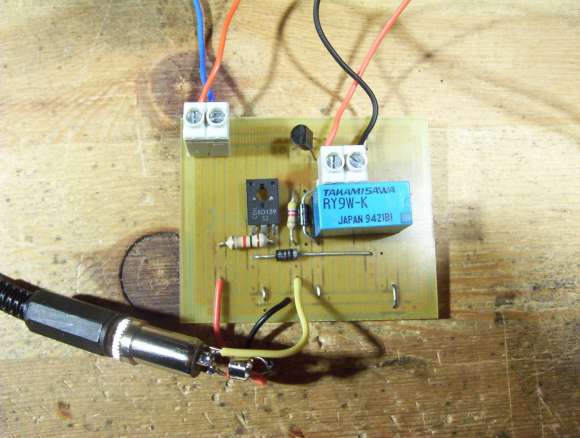
 Ci-dessous ,
le montage câblé sur
un Cimec. (Vu à la loupe, la réalité est bien plus réduite !) Ci-dessous ,
le montage câblé sur
un Cimec. (Vu à la loupe, la réalité est bien plus réduite !)
|
|
|
|
|
Cette partie  est
extrêmement simple, il y a les deux autres moitiés des
optocoupleurs, un transistor de puissance BD139 pour la commande
du courant dans les rails, et un petit transistor pour la commande
du relais d´inversion. [Nous avons fait figurer la masse de
cette partie puissance avec un symbole différent de la masse
du circuit de commande afin de bien matérialiser la
séparation électrique totale entre les deux
parties : alim 3 V avec son plus et son zéro pour
la commande ; alim 15 volts pour la traction avec son plus
(noté ++) et sa masse. Garantie sans parasite !
N.D.L.R.] est
extrêmement simple, il y a les deux autres moitiés des
optocoupleurs, un transistor de puissance BD139 pour la commande
du courant dans les rails, et un petit transistor pour la commande
du relais d´inversion. [Nous avons fait figurer la masse de
cette partie puissance avec un symbole différent de la masse
du circuit de commande afin de bien matérialiser la
séparation électrique totale entre les deux
parties : alim 3 V avec son plus et son zéro pour
la commande ; alim 15 volts pour la traction avec son plus
(noté ++) et sa masse. Garantie sans parasite !
N.D.L.R.]
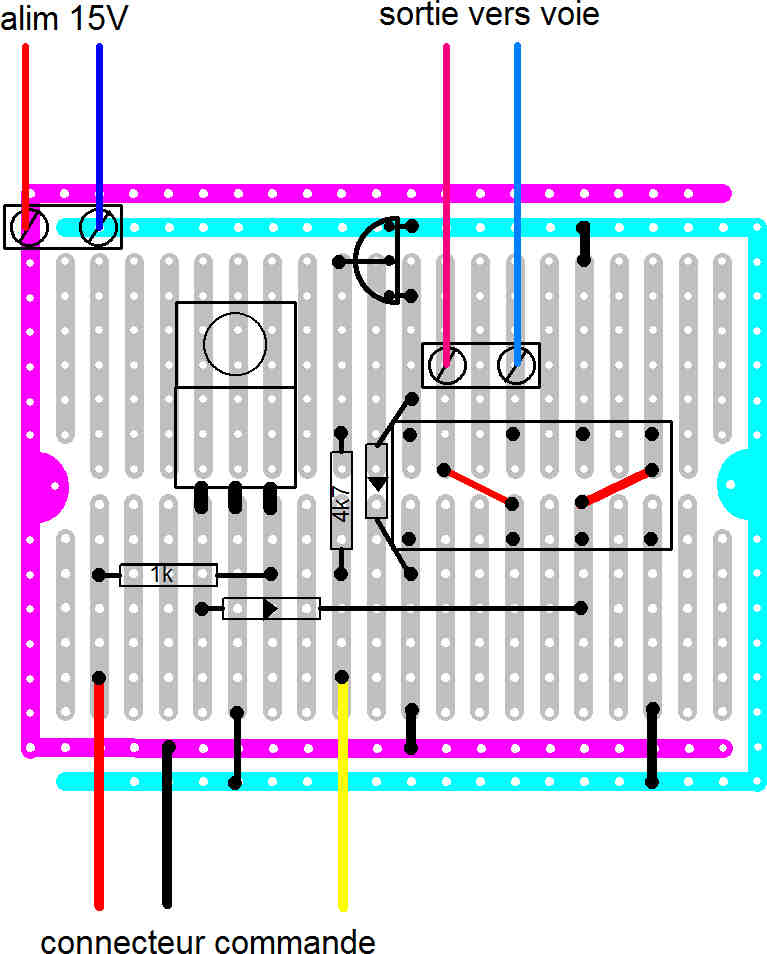
L´implantation,
de nouveau sur Cimec : |
 |
Nota-bene. —
Les deux straps (cavaliers) SOUS le relais
 doivent être
soudés
AVANT de souder le relais (ou son support) ;
après,
il sera trop tard... [N.D.L.R. Il faut d'ailleurs toujours
souder les straps en premier !] doivent être
soudés
AVANT de souder le relais (ou son support) ;
après,
il sera trop tard... [N.D.L.R. Il faut d'ailleurs toujours
souder les straps en premier !]
| |
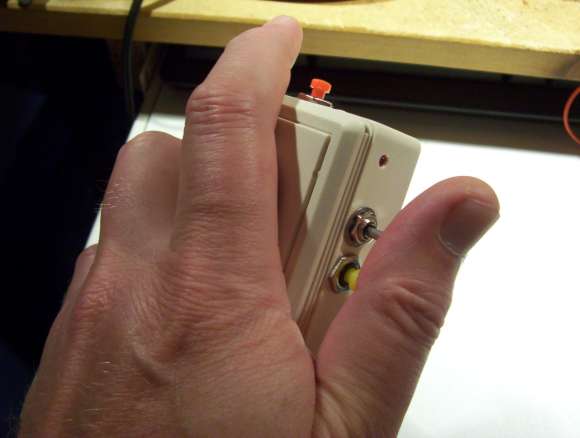
| 9.1.4. Manipulation |
Le boîtier de
commande est conçu pour être manipulé  d´une
seule main, le pouce pour l´accélération et le freinage,
ou pour le changement de sens, et l´index pour l´arrêt
d´urgence. d´une
seule main, le pouce pour l´accélération et le freinage,
ou pour le changement de sens, et l´index pour l´arrêt
d´urgence.
|
| 9.2.
Génération du signal |
|
| 9.2.1. Principe |
Le coeur de notre programme
est la génération du signal rectangulaire,
qui va commander le courant dans la voie.
Le signal est de la
même forme que dans notre montage Youbitonmatic avec
une certaine période fixe, donc une fréquence.
Par construction, cette fréquence sera de 244 Hz.
Mais de plus, on va
faire varier ce que l´on appelle le “rapport
cyclique”, c´est-à-dire le rapport entre le temps
où le signal est haut (3 volts) et le temps où le signal
est bas (zéro).
En haut en bleu ,
le rapport est proche de 20%, c´est-à-dire que le courant
moyen est faible (3 volts x 0,2 = 0,6 volt) et on
va rouler au ralenti [et grâce à cette forme de courant
les locomotives n´ont pas tendance à caler ; c´est
comme un petit coup de pied au derrière 240 fois par seconde
qui empêche les mauvais moteurs de s´endormir... N.D.L.R.].
En bas en rouge ,
le rapport est proche de 80 %, le courant moyen est élevé (3 volts x
0,8 = 2,4 volts), on va rouler vite...
C´est le principe
de base des commandes de trains modèles par courant
haché : les moteurs de nos locomotives “calculent” cette
moyenne ; si le rapport est faible, peu de courant en résulte
et le moteur tourne lentement ; si le rapport est élevé,
le courant est plus important et le moteur tourne plus vite. Nous allons
donc introduire une nouvelle variable dans notre programme, la VITESSE.
Cette variable contient notre rapport cyclique, et ira de 0 à 255 :
On voit que la période
est toujours égale à 255 car égale à temps
bas + temps haut, c´est-à-dire 255 — VITESSE + VITESSE = 255.
La VITESSE pourra
varier de zéro (le signal est toujours bas, donc à 0 volt) à 255
(le signal est toujours haut, donc à 3 volts).
Le coeur de notre programme
sera donc d´émettre ce signal, à une fréquence
fixe et de rapport cyclique VITESSE.
Le reste n´est que des accessoires, les boutons n´étant
là que pour faire varier VITESSE vers
le haut (accélération), vers le bas (freinage) ou VITESSE à zéro
pour le bouton stop.
|
PTI+ PWM — Le
montage proposé à base de rapport cyclique
variable est appelé PWM en anglais (pulse width
modulation = modulation de largeur d´impulsions)
Certains PIC, comme par exemple le PIC 16F627A, comportent
en standard un dispositif permettant de générer
ce type de signal.
Nous
n´utiliserons cependant pas cette facilité,
d´abord parce que nous sommes à Ptitrain et
que nous voulons rester simple, mais surtout qu´il
est difficile de générer un signal de basse
fréquence (inférieur à 1 kHz)
comme nous le souhaitons. Sachez que cela existe, vous
le testerez peut-être un jour. |
|
|
| |
| 9.2.2. Utilisation
du Timer0 |
Pour générer
ce signal, nous allons utiliser ici le Timer0 (qui
compte de 0 à 255) avec une valeur de pré-diviseur adéquate
pour obtenir notre fréquence. Rappel : le pré-diviseur
permet de ne compter que tous les X cycles d´horloge, c´est-à-dire
qu´au lieu de s´incrémenter à chaque cycle (toutes
les microsecondes), le Timer0 ne s´incrémente
que tous les X cycles d´horloge, X pouvant être fixé entre
2 et 256. Pour obtenir un signal de la forme définie ci-dessus,
il faut fixer X à 16, le Timer0 ne
comptera que tous les 16 cycles d´horloge.
Dans notre cas, cela
signifie que notre timer ne va plus s´incrémenter à chaque
microseconde, mais toutes les 16 µS. Si VITESSE est
de 200, nous aurons un signal composé en sortie de :
un
signal haut de 200 fois 16 µS = 3.200 µS,
un
signal bas de (256 — 200) fois 16 µS = 896 µS,
soit au total 3.200
+ 896 = 4.096 µS, donc à une fréquence
de 1/0,004096 = 244 Hz C.Q.F.D. !
|
PTI+ Fréquence
du courant traction — Il y a toujours eu,
et il y a encore, beaucoup de discussions sur l´utilisation
du courant rectangulaire pour nos petits trains, et
son impact sur les moteurs de locos “haut de
gamme” à rotor sans fer.
Pour ma
part, sur un réseau en N, j´utilise une
fréquence de 244 Hz (comme le présent
montage) sans aucun problème. Mais je sais que
les puristes ne sont pas tous d´accord, et, curieusement,
même sur un site aussi bien documenté que
de celui de l´A.M.F.N., il n´est pas indiqué de
fréquence, même si tous les schémas électroniques
sont donnés.
Il est
bien entendu qu´en jouant sur le Timer0 il
est possible d´adapter la fréquence à votre
souhait. |
|
|
|