|
| Objectif |
 Commander la fermeture des barrières d´un passage à
niveau et actionner un clignotant lent
alterné quand un convoi s´approche. Commander la fermeture des barrières d´un passage à
niveau et actionner un clignotant lent
alterné quand un convoi s´approche.
Le système
fonctionne dans n´importe quel sens
et un convoi peut entrer dans la zone protégée et en ressortir du même
côté après avoir fait une marche arrière.
|
| Composants |
|
(Coût total 7 à 8 euros hors PN.)
1 PIC 12F629 ou 12F675 (maximum 2,20 €)
1 support à 8 pattes (0,10 €)
4 diodes 1N400X (4 x 0,08 €)
1 régulateur 7805 ou 78L05 (0,40 €)
1 condensateur 100 µF (0,25 €)
1 condensateur 100 nF (0,10 €)
4 phototransistors IRE5 (4 x 0,35 €)
2 photodiodes IRES5 (4 x 0,35 €)
4 résistances 220 ohms (0,08 €) et 1 de 10kohms
4 leds rouges 1,8 ou 3 mm (4 x 0,30 ou 0,10 €)
1 morceau de Veroboard ou Cimec de 2 x 3 cm environ
Compléments éventuels pour fermeture du passage à niveau |
 |
|
| Implantation des
capteurs |
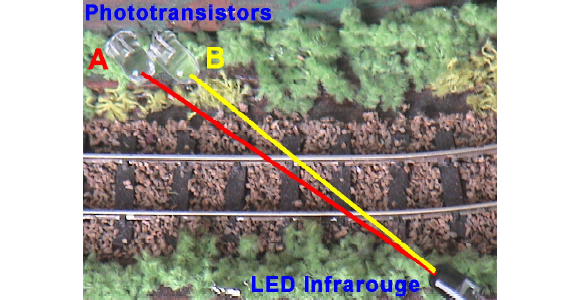
La détection se fait
par des capteurs à infrarouge, faciles à
placer discrètement de part et d´autre du passage à niveau (pas
encore camouflés sur la photo ci-dessous  ). ).
Deux groupes de
détecteurs optiques A+B et C+D sont placés
de part et d´autre du passage à niveau et à une distance
suffisante pour permettre la fermeture des barrières.
|
| Principe de
fonctionnement |
Chaque détecteur est
composé de deux phototransistors placés côte à côte, de manière à
détecter le sens de marche. L´angle d´ouverture permet de
mettre en face une seule led IR. Le faisceau sera placé de biais pour
éviter de voir l´espace entre deux wagons.
L´entrée dans la zone (de gauche à droite)
correspond au front d´occultation de B pendant que A est
occulté.
La sortie de la zone (de droite à gauche)
correspond au front de désoccultation de B pendant que A est
occulté.
La fonction de front
montant ou descendant aurait pu être traitée par une logique
analogique, mais il est intéressant de tout traiter par le PIC. Chaque
barrière consomme deux entrées du PIC, sans aucun autre composant (sur
certains réseaux très parasités, il sera peut être nécessaire de mettre
une résistance de charge ou de découpler par un transistor).
La fermeture du PN
est commandée par l'entrée dans la zone, par l'une ou l'autre
extrémité.
L'ouverture du PN
est commandée par la sortie de la zone, par l'une ou l'autre
extrémité.
Nota1 : Il aurait été envisageable, comme dans la
réalité, de commander l´ouverture des barrières dès que le
convoi est sorti du PN en plaçant un capteur supplémentaire sur le
passage à niveau, pour commander l´ouverture dès sa
désoccultation. Mais, dans ce cas, rien n´aurait permis, en cas
de marche arrière, de refermer les barrières avant l´arrivée du
convoi.
Nota2 : Si
le faisceau arrive à passer au travers du train, parfois le signal
bascule un court instant (B se désocculte alors que A est réoccultée,
ce qui est interprété par la logique comme une marche arrière, mais B
se réocculte ensuite et tout revient dans l'ordre). C'est assez court
pour ne pas perturber le fonctionnement global, ce qui laisse penser
que, si l'on est limite, il n'y aurait peut-être pas vraiment besoin de
mettre le faisceau en biais. En revanche, il existe un risque de
dysfonctionnement - peu probable, mais on ne sait jamais, par exemple
avec des objets étroits sur un wagon plat - si les longueurs du trou
puis de l'occultation du dernier élément du wagon de queue sont toutes
les deux inférieures à la distance entre les faisceaux reçus par les
deux phototransistors (B se désocculte alors que A est réoccultée,
laissant croire que le convoi est sorti en marche arrière, mais quand B
se réocculte A est désoccultée, ne corrigeant pas l'interprétation
erronnée).
|
 |
|
| Schéma électrique |
 Difficile de faire
plus simple ! Difficile de faire
plus simple !
Grâce aux
résistances intégrées au PIC, les phototransistors sont branchés
directement sur les entrées du PIC et polarisés par les résistances de
tirage intégrées dans le PIC (l'entrée GP3 n'en comprenant pas il faut
une résistance externe de 10kohms).
Le système
n´utilisant pas de lumière modulée, il pourra éventuellement
être nécessaire de protéger les phototransistors pour qu´ils ne
reçoivent pas directement la lumière du soleil (en général un petit
tube ou un bout de gaine thermorétractable suffit).
Le clignotement
alterné des feux utilise la sortie 1 en mode “tri-stable”
(isolée au repos ou alternativement + 5 V et 0 V).
Les sorties du PIC
fournissent 25 mA sous 5 V. Une interface de puissance (phototransistor
ou phototriac) sera en général nécessaire pour la commande du passage à
niveau.
|
| Structure du programme
|
Détection de présence : Pour détecter le sens du
convoi, il a fallu traduire en algorithme séquentiel une combinatoire
dynamique.
Détection du front montant de B pendant que A est
occultée (tête de convoi entrant du côté de A) :
La Boucle Principale
attend que A ou D soit occulté. La suite ne décrit que ce qui se passe
à l´entrée AB (identique pour CD).
Si A et B sont
occultés retour à la boucle d´attente.
Si A est occulté
mais pas B, le programme avance et attend que B soit occultée, tout en
vérifiant que A l´est toujours.
Si A n´est plus occulté retour à la boucle d´attente. Si
A avait été occulté par un parasite (ou un doigt !), la perturbation
n´aura donc duré qu´un cycle.
Si B
s´occulte pendant que A l´est, c´est que la tête
d´un convoi vient de franchir successivement A puis B : commande
du PN.
Détection du front descendant de B pendant que A est
occultée (queue de convoi sortant du côté de A) :
Après que la
commande PN a été activée, une boucle attend que A (ou D de manière
identique à ce qui suit) soit occulté. Voir la remarque ci-dessus
relative au fait qu´en sortie l´état des phototransistors
n´est scruté que chaque demi-période de clignotement.
Si A est occulté
mais pas B retour à la boucle d´attente.
Si A et B sont
occultés, le programme avance et attend que B soit désocculté, tout en
vérifiant que A l´est toujours.
Si A n´est
plus occulté retour à la boucle d´attente. Si A avait été
occulté par un parasite (ou un doigt !), la perturbation n´aura
donc duré qu´un cycle.
Si B se désocculte
pendant que A est occulté, c´est que la queue d´un convoi
vient de franchir B vers A : ouverture du PN.
|
| Clignotant alterné |
Clignotement progressif par modulation de phase
(PWM)
Le mode PWM permet
un clignotement lent assez réaliste avec allumage et extinction
progressifs.
Pour ne pas occuper
le processeur par la gestion du clignotement au risque de rater la
détection lors du passage d´une fin de convoi devant les
capteurs, j´ai repris certains principes décrits par Psi pour sa
commande Pic´Train2 : le
clignotement est géré par le Timer sur la base de paramètres stockés en
mémoire qui ne sont mis à jour que périodiquement. Le sous-programme de
mise à jour ne dure que quelques millisecondes et peut donc être appelé
à chaque boucle du programme de détection de sortie.
Le sens
d´évolution est mis en mémoire et inversé lorsque
l´intensité atteint 255 ou zéro.
Avec une valeur
d´intensité qui oscille entre 0 et 255, il n´est pas
nécessaire de faire évoluer l´intensité à chaque cycle mais il
suffit d´ajouter ou d´enlever plusieurs unités (cran) à
l´intensité tous lesn cycles, ce qui allège le traitement
et facilite le réglage.
Comme dans Pic´Train2, pour la commande de
hachage en mode PWM, la période est fixée à 255 tops d´horloge
(après division par 16) et la valeur de l´intensité varie de 0 à
255. C´est astucieux car le temps de conduction est égal à la
valeur de l´intensité, suivi d´un temps de repos égal à
(255 — Intensité).
Sortie tristable pour avoir un allumage alterné
de chaque groupe de leds
La signalisation autorisée par le montage comporte
deux clignotants en mode alterné de chaque côté de la voie (la
réglementation actuelle en France ne rend plus qu´un
seul clignotant obligatoire pour les trains – il y en a
deux pour les avions – mais ce n´est pas le cas
partout et les puristes pourront toujours n´en mettre
qu´un).  Il y a donc quatre leds, commandées deux par deux,
mais on peut n´en mettre que deux pour remplacer le
clignotement alterné par un seul feu en clignotement lent. Il y a donc quatre leds, commandées deux par deux,
mais on peut n´en mettre que deux pour remplacer le
clignotement alterné par un seul feu en clignotement lent. |
|
|
 |
Pour réaliser un
clignotement alterné, la sortie du PIC est utilisée en mode tristable,
l´éclairement de l´un des groupes de leds étant
exactement à l´opposé de celui de l´autre groupe.
Un des groupes de
deux leds est branché entre le + 5 V et la sortie au travers
d´une résistance limitant le courant, l´autre groupe de
deux leds étant branché entre le 0 v et la sortie, également avec une
résistance de limitation.
Au repos la sortie
est paramétrée comme entrée, donc avec une haute impédance et son
potentiel est libre. Comme il y a quatre leds rouges en série entre le
+ 5 V et le 0 V, la chute de tension dans les leds (environ 4 fois
1,6 volt) est trop forte pour que les leds soient allumées lorsque la
sortie est à l´état neutre (pas de convoi détecté dans la zone
du passage à niveau).
Quand une présence
est détectée dans la zone du passage à niveau, le programme affecte le
port en sortie : selon la commande état haut ou état bas du PWM, la
sortie est soit à 0 V soit à + 5 V. Lorsque la sortie est à
l´état haut, les deux leds branchées entre la sortie et le 0 V
sont allumées, lorsque la sortie est à l´état bas, les deux leds
branchées entre la sortie et le + 5 V sont allumées. |