Les servomoteurs
sont commandés par un signal “carré”, de période d’environ 20 millisecondes [N.D.L.R.
En France, l'abréviation de milliseconde est ms ; l'abréviation de microseconde
est µs ou, sur Internet, us]. Les servomoteurs
sont commandés par un signal “carré”, de période d’environ 20 millisecondes [N.D.L.R.
En France, l'abréviation de milliseconde est ms ; l'abréviation de microseconde
est µs ou, sur Internet, us].
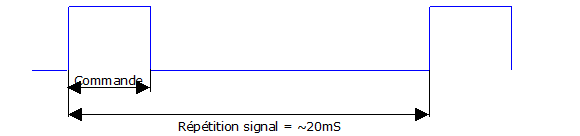
La largeur de l’impulsion “commande”
commande la position du servomoteur. En général, le minimum (= un côté de la position) est
aux alentours de 0,6 ms, le maximum (l’autre côté du positionnement) est aux
alentours de 2 ms.
La répétition est en général fixée à
environ 20 ms. Cette valeur n’a pas beaucoup de sens, elle n’est qu’un
minimum indicatif. En effet, s’il n’y a plus de signal de commande, le servo
reste à sa position, mais il peut être “bougé” à la main ou par une charge lourde.
Ce n’est que la répétition de la commande qui “fixe” le servo à cette position.
 |
FAQ Répétition
du signal de commande. — Les types de servomoteurs sont nombreux, et les
utilisations encore plus, cela fait qu’il y a toujours des discussions sur
la répétition de la commande, que j’ai fixée ici à
20 ms. Comme indiqué, un signal ne fait que positionner le servomoteur
sur une position, on le répète uniquement pour éviter que le
servomoteur ne bouge de cette position si une force extérieure lui est appliquée.
Elle n’est donc pas obligatoire.
Le problème provient du
terme force extérieure : charge lourde, force raisonnable...
bref, combien de newtons ? Tout dépend de votre servomoteur et ce que vous
en faites : s'il s'agit de lever une barrière de passage à
niveau en H0, il est probable que la répétition est inutile, surtout
s'il y a des frottements importants. Si vous voulez manoeuvrer un pont
levant de 40 cm ou une grue portuaire en zéro, construite en profilés métalliques,
avec un mécanisme bien huilé, il est très probable que la position
ne soit pas stable sans la répétition.
Il n'y a donc pas de solution
unique, je donne ici ce qui se fait en standard, faites des essais si vous sortez
du standard. |
|
|
Ce n’est peut-être par très clair,
mais on peut aussi dire qu’une commande positionne le servo à la position souhaitée,
et que la répétition de la commande est nécessaire pour que le servo reste à cette position
peu importe la contre-force appliquée. Je pense que le délai de 20 ms est le temps
de réaction de l’électronique du servo (il n’y a pas de microprocesseur à 20 MHz
à l’intérieur, que de l’électronique discrète).
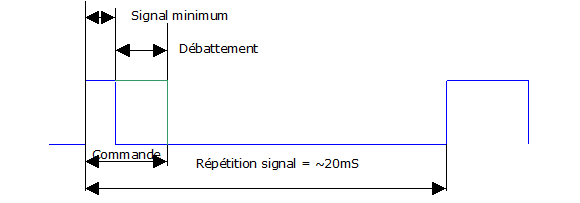
En pratique pour notre programme, une
commande varie entre deux valeurs : 1) signal minimum, correspondant à une des positions
extrêmes du servo, 2) signal maximum, correspondant à la position extrême de l’autre
côté.
Le signal n’est pas une valeur
absolue, mais est donné par la somme du signal minimum et de la valeur du débattement.
Les paramètres de commande d’un
servomoteur sont donc la valeur minimum (correspondant à une position extrême du servomoteur)
et le débattement maximum (correspondant à la position extrême de l’autre côté). |