|
|
|
 |
|
 J´ai
donc divisé le réseau en 5 zones, chacune de ces zones étant pilotée
par un PIC 12F675. Pour commander les PIC, j´utilise deux méthodes, des
ILS (interrupteurs à lames souples), actifs au niveau J´ai
donc divisé le réseau en 5 zones, chacune de ces zones étant pilotée
par un PIC 12F675. Pour commander les PIC, j´utilise deux méthodes, des
ILS (interrupteurs à lames souples), actifs au niveau  ,
et des détections électroniques, actives au niveau ,
et des détections électroniques, actives au niveau  .
Il me faut bien sûr des petits aimants collés sur le châssis des
tramways. .
Il me faut bien sûr des petits aimants collés sur le châssis des
tramways.
La zone 1 est
pilotée par deux ILS. Cette zone est composée de trois parties, soit l´entrée
et la sortie — qui doivent pouvoir être inversées — et la partie
centrale — qui est toujours dans le même sens. C´est dans cette partie
centrale que l´arrêt se fait.
Le premier ILS (ILS 1)
commande une séquence qui est la suivante : ralenti, arrêt de plus
ou moins 5 secondes, inversion de polarité pour les sections aval et amont
(entrée et sortie), redémarrage en accélération progressive.
Comme nous sommes dans une boucle, le tramway peut sortir de la zone 1 et entrer
dans la zone 2 sur une des deux voies parallèles. C´est à l´entrée
de cette zone 2 que se trouve le deuxième ILS (ILS 2) qui commande
une remise à zéro de la zone 1... |
|
|
|
|
|
 |
|
La
zone 2 est pilotée par les détections. Chaque zone a sa
propre détection. Le principe est que lorsqu´il y a présence dans
la zone 4 ou dans la zone 5, le tramway s´arrête et attend que
la voie soit libre.
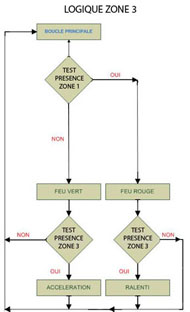
La zone 3 fonctionne
de la même façon : quand un tramway y pénètre, il s´arrête
si la zone 1 est occupée.
La zone 4 est
pilotée par 2 ILS, qui contrôlent l´inversion de polarité dans
cette zone. Le premier ILS (ILS 3) se trouve en sortie de la zone 2, le second (ILS4)
en sortie de la zone 5.
La zone 5 est
un système de va-et-vient dont la logique comprend le test de deux ILS (ILS 5
et ILS 5bis), chacun commandant une séquence de ralenti, d´arrêt,
d´inversion
de polarité et de redémarrage. |
Tous les aiguillages sont talonnables,
donc il n´est pas nécessaire de prévoir leur commande.
Pour ce qui est de la détection électronique,
je vous renvoie à l´article de Psi consacré au va-et-vient Pictrain3.
J´ai seulement ajouté (sur les conseils de Psi) un petit condensateur de 47 µF
intercalé entre l´entrée de l´optocoupleur et la masse, afin d´éviter
les rebonds dus aux mauvais contacts.
Comme il s´agit de tramways et non
de longues rames de train, il n´est pas nécessaire de prévoir des zones
d´arrêt. Dans les zones 2 et 3, les tramways s´arrêtent au milieu
de la zone ; dans la zone 5, les tramways s´arrêtent à l´extrémité de
chaque tiroir.
Les PIC gèrent également
une signalisation simplifiée 2 feux, ce qui correspond pratiquement à la
signalisation des tramways vicinaux belges.
En ce qui concerne la programmation des
PIC, j´utilise les routines de Psi (Pictrain3,
de nouveau) pour générer le PWM en mode interruption et, en général,
j´essaye de respecter sa philosophie pour les noms de variables.
Le schéma ci-dessous  est
celui de la zone 1. Les schémas des autres zones peuvent facilement être
déduits de celui-ci, puisqu´il contient tous les éléments possibles,
une sortie voie via inverseur, une sortie voie directe sans inverseur, des sorties PIC vers
le transistor de sortie, vers le relais inverseur et vers les leds, les entrée PIC
venant des ILS dont une (GPIO3) disposant d´une résistance de pull-up extérieure.
Pour les entrées PIC venant des détections, voir encore le schéma Pictrain3 de
Psi. est
celui de la zone 1. Les schémas des autres zones peuvent facilement être
déduits de celui-ci, puisqu´il contient tous les éléments possibles,
une sortie voie via inverseur, une sortie voie directe sans inverseur, des sorties PIC vers
le transistor de sortie, vers le relais inverseur et vers les leds, les entrée PIC
venant des ILS dont une (GPIO3) disposant d´une résistance de pull-up extérieure.
Pour les entrées PIC venant des détections, voir encore le schéma Pictrain3 de
Psi.
|
| Mes galères... |
La puissance sur le transistor de sortie,
les interférences entre les PIC, les parasites…
 Pour
ce qui est de la puissance, il faut absolument passer soit par le montage Darlington soit
par un Mosfet [voir dans
notre rubrique Meccano électronique, la page théorique ad hoc].
Sur le schéma donné ci-dessus, c´est le montage Darlington classique avec
simplement un BC547 intercalé entre l´optocoupleur et le BD139. J´ai également
essayé de remplacer le BD139 par un Mosfet, et ça marche bien également,
il faut juste intercaler une résistance de polarisation (vers la masse) de 10 kΩ. Pour
ce qui est de la puissance, il faut absolument passer soit par le montage Darlington soit
par un Mosfet [voir dans
notre rubrique Meccano électronique, la page théorique ad hoc].
Sur le schéma donné ci-dessus, c´est le montage Darlington classique avec
simplement un BC547 intercalé entre l´optocoupleur et le BD139. J´ai également
essayé de remplacer le BD139 par un Mosfet, et ça marche bien également,
il faut juste intercaler une résistance de polarisation (vers la masse) de 10 kΩ.
Pour
ce qui est des interférences, il faut absolument relier toutes les masses des différents
circuits imprimés entre elles.
En
ce qui concerne les parasites, ils viennent surtout des liaisons entre les ILS et les PIC,
j´ai utilisé du câble blindé pour faire ces liaisons.
Je remercie tout particulièrement Pierre
(dit “Psi”)pour ses précieux conseils, merci aussi à Jean-Pierre
Maniquaire ainsi qu´à Jean-Claude Grimaldi qui,
par leurs conseils sur le
forum Ptrainmatique, m´ont permis d´utiliser les outils de programmation et
de gravure des PIC avec Windows Vista. |